Often, with a career and personal devotion to the science of innovation, we can’t always wait for funded projects to materialize. It was a meeting with Greg Marshall- inventor of the revolutionary “Crittercam” that broadened the perspectives available through National Geographic that kicked off the development of a conceptual Hydro-Aerial hybrid robot with a science and storytelling agenda. At lunch in Washington D.C., I asked Greg what one factor was most critical in successfully securing a NG Cover shot or target media clip. His profound one word reply, “Propinquity.” Greg went on to elaborate about the complexity of each shoot and the vast amount of effort and film utilized to secure each payoff moment or sequence. It was exactly that effort that this concept sought to streamline using more modern technology and an amphibious ROV. Instead of coordinating a typical complex team and resources to get photographers in the water and hope for a key slice of creature action, this solution would quickly move to assess where the target activity is from an aerial perspective- quickly, and unobtrusively move to the location using a custom hexacopter and streaming video feed, then drop into the water including a seamless transition from aerial to underwater perspective- upon landing on the water surface and halting the energy intensive flight program, the ROV could now idle on the water surface while deploying a separate undersea camera and/or miniature aquatic ROV. An initial proof of concept utilized a 360 camera to simultaneously capture all perspectives from flight to underwater, and then lower into the water to continue the observation.
Features included a stablizing design with a wide quad-pontoon structure to resist wave action while deploying a sealed radio controlled and inductively charged pouch. The body of the quad also included a sealed mechanical winch chamber and tethered communciation cable that also served as a physical connection. The lightweight sealed structure was skinned with a hydrophobic coating to instantaneously dry and seal the craft as it landed and deployed from the water surface. Ocean and inland testing occured here in North Carolina as well as strategic locations on the Florida coast.

This was a successful prototype in many ways- one of many things we learned from this is that in high wave or ocean environments, the active-resist philosophy of stablization would be a challenging battle to win at this scale. Instead, the next version was driven toward passive stablization in several ways. Chiefly, it was redesigned as a spherical body hexacopter design. This design had a heavily biased weight (chiefly batteries) toward the base and the smaller, more numerous carbon fiber arms allowed a closer center of gravity and prompt gravity based alignment and correction. The ball-shaped body allowed waves to harmlessly crash over the craft while maintaining proper alignment, and the hex design allowed take offs even in high waves & wind. The secondary payload deployment included another passive element in heave compensation- a stainless constant force spring was balanced to allow slack in the tether line to allow the craft to navigate or hover in place while the “mothership” bounced on the waves at the surface.
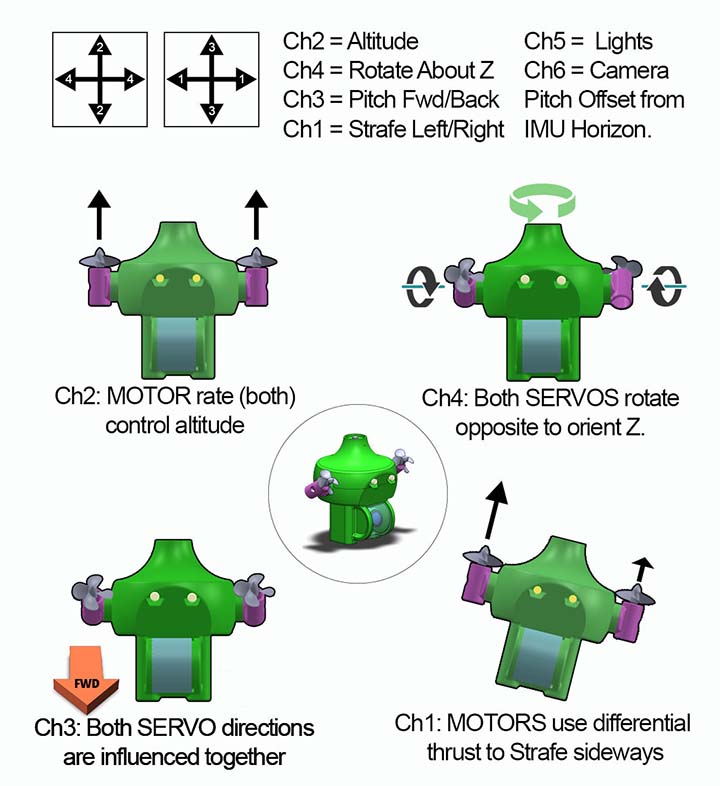
3 primary concepts were developed in order of difficultly, the last being the fully separate tethered micro-ROV design. This micro ROV utilized concentric coreless motor pods that could be independently servo driven along their axes. This allowed for full control of this tiny submarine complete with stablizing camera & lights. Further versions included a sensor array as well as sampling head to leverage the actual contact with the marine environment and animals.
Along the way, Greg had connected me with some of his resources at National Geographic and elsewhere with an intial focus on whale study applications. To that end, Fred Sharpe & Ed Lyman were tapped to assist in a planned expedition to Hawaii. Unfortunately this expedition was ultimately indefinitely postponed due to the challenges of funding & covid. This resulted in a missed seasonal window, but also in opportunities to further refine some of the more challenging directions of this concept.
This is where the project stands at this point- the micro-ROV to my knowledge is the smallest of that capability that has ever been designed, and while I recognize the challenges yet to be surmounted to deliver useful data & media from this ambitious effort, significant progress has been made and tested including initial underwater navigation with simultaneous video streaming.